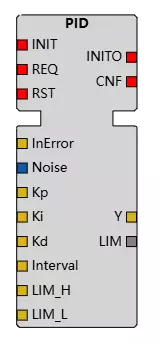
PID功能块
PID是实现PID计算的功能块。以下是它的各个参数的解释:
INIT:初始化算法参数
REQ:触发算法
RST:重置算法
InERROR:输入的误差值
Noise:噪声设置(输入误差值小于噪声范围时将被置0)
KP:算法中的KP设置
Ki:算法中的KI设置
Kd:算法中的KD设置
Interval:PID计算周期
LIM_H:PID输出上限
LIM_L:PID输出下限
Y:输出PID计算结果
LIM:计算结果是否超过设置范围
PID是实现PID计算的功能块。以下是它的各个参数的解释:
INIT:初始化算法参数
REQ:触发算法
RST:重置算法
InERROR:输入的误差值
Noise:噪声设置(输入误差值小于噪声范围时将被置0)
KP:算法中的KP设置
Ki:算法中的KI设置
Kd:算法中的KD设置
Interval:PID计算周期
LIM_H:PID输出上限
LIM_L:PID输出下限
Y:输出PID计算结果
LIM:计算结果是否超过设置范围